机器人应用中的连接器验证:如何应对动态工况挑战
随着机器人向高动态、小型化及多场景应用发展,连接器的可靠性逐渐成为影响整机稳定性的关键因素。
在实际应用中,连接器需要承受持续运动、高频插拔以及复杂环境等多重工况,仅依赖常规测试指标,已难以全面反映其使用表现。
因此,从实际工况出发制定系统的验证方案,是提升连接可靠性的关键。
(机器人应用为连接器设计与验证带来独特挑战)
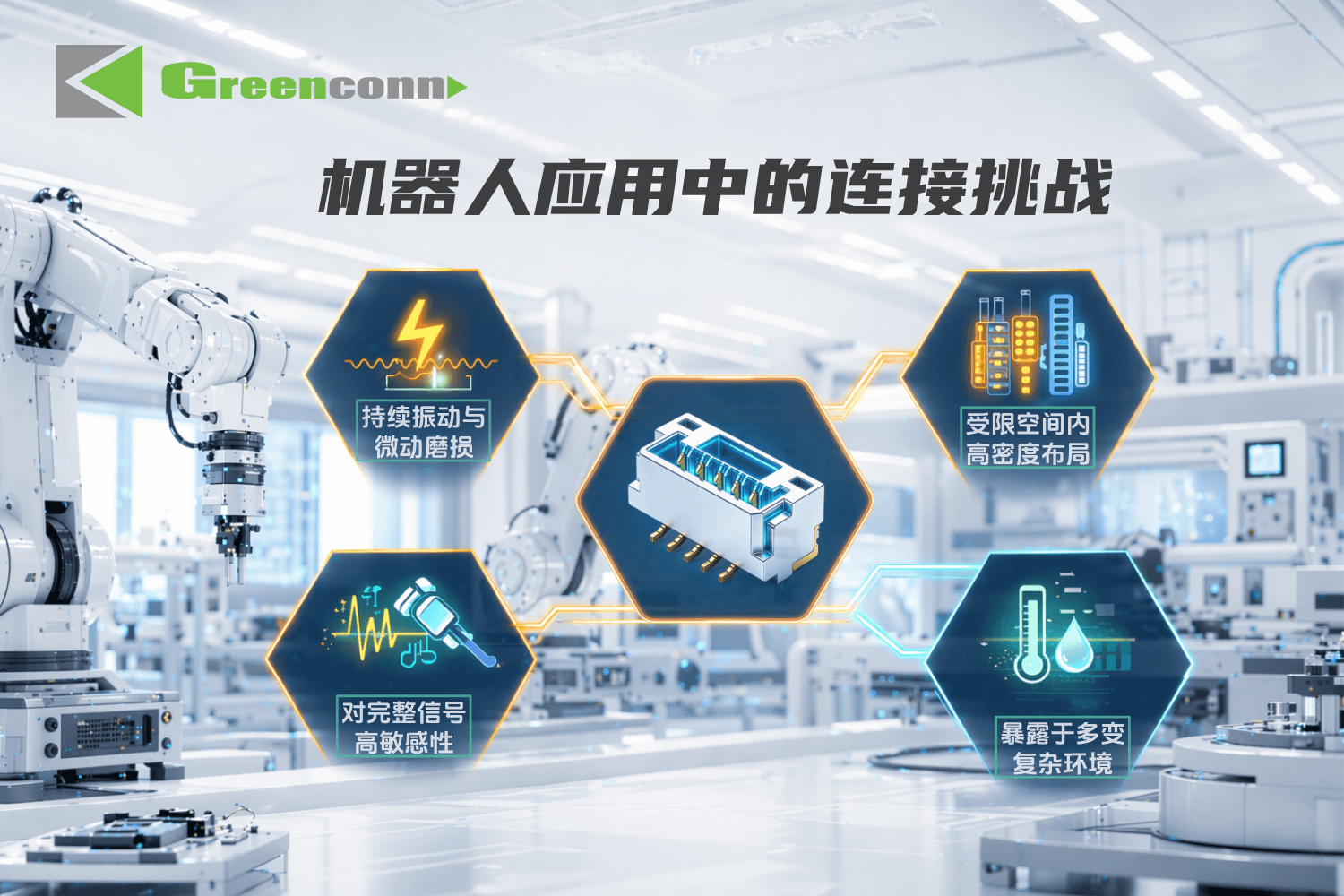
1. 机器人应用带来的连接挑战
与传统工业设备相比,机器人在结构和运行方式上存在明显差异,对连接器提出了更高要求,主要体现在以下几个方面:
- 多轴运动与持续振动,易引发微动磨损,影响接触稳定性
- 紧凑设计下的高密度布局,提高了装配与连接可靠性的要求
- 控制与反馈系统对信号质量敏感,对传输稳定性要求更高
- AGV、AMR等移动设备面临温湿度变化及冲击等复杂环境
这些因素叠加,使连接器的失效模式更加多样,也对验证方法提出了更高要求。
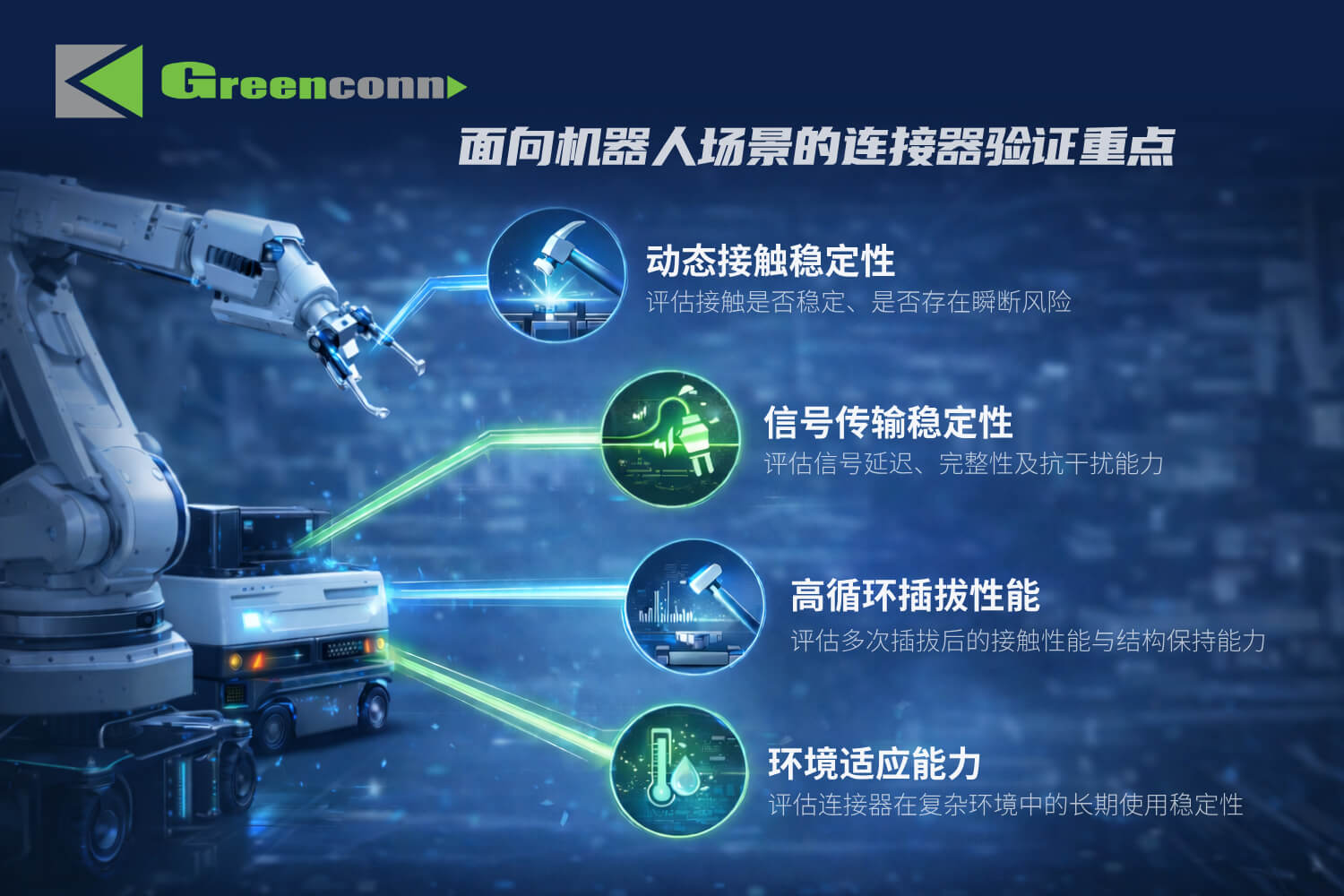
2. 面向机器人场景的连接器验证重点
在机器人应用中,连接器验证的重点不只是“是否达标”,而是“在工况下是否稳定”,主要关注以下几个方面:
动态接触稳定性
在持续运动条件下,连接器需要保持稳定导通。振动与冲击测试不仅用于验证结构强度,更用于评估接触是否稳定、是否存在瞬断风险。
信号传输稳定性
控制系统依赖实时数据传输。通过阻抗与传输测试,可评估信号延迟、完整性及抗干扰能力。
高循环插拔性能
模块化设计使插拔频率增加,需要通过寿命测试评估多次插拔后的接触性能与结构保持能力。
环境适应能力
通过温度循环、湿热及腐蚀测试,评估连接器在复杂环境中的长期使用稳定性。
(面向不同应用工况的机器人连接器验证重点)
3.从标准测试到工况验证
为更贴近实际应用,连接器验证正在从单一标准测试,转向结合工况的综合评估,常见做法包括:
- 引入多轴或复合振动条件,更接近真实运动状态
- 在环境测试中叠加温度、湿度与机械应力
- 在动态过程中监测接触电阻及信号变化
- 通过多轮循环测试与数据分析,提高结果一致性
通过这些方法,可以更早识别潜在问题,从单项性能验证,转向系统层面的可靠性评估。

(面向机器人动态工况的连接器验证方法)
在实际工程中,例如Greenconn在连接器开发过程中引入工况验证方法,将实验室测试与应用场景模拟相结合,以支持机器人及自动化设备的应用需求。
随着机器人应用不断扩展,连接器验证也在向更贴近实际工况的方向发展。通过将测试方法与使用场景相结合,有助于提前识别风险,保障系统中电源与信号连接的长期稳定。

