連接器:構建機器人“神經感知”與“動力傳輸”的關鍵支撐
在機器人系統中,演算法與軟體決定系統的“決策能力”,而硬體連接則直接影響其“執行品質”。 作為貫穿整機的關鍵互連單元,連接器承擔著數據傳輸、信號控制與動力供給等核心任務,其性能直接關係到機器人運行的穩定性、回應精度與系統可靠性。
(連接器:機器人感知與執行的工程基礎)
一、不同機器人類型中的連接應用特點
隨著機器人系統整合度不斷提升,不同類型機器人對連接器在可靠性、裝配適應性及電氣性能方面提出了差異化要求。
· 工業機器人
長期運行於高負載工況,連接系統需具備穩定供電能力、良好的抗振動性能及抗電磁干擾能力,以保障多軸聯動控制的可靠性;
· 仿生機器人
結構緊湊、自由度高,連接需求集中在關節驅動與感測模組,對小型化、高密度互連及高速信號傳輸能力要求更高;
· 服務機器人
面向人機互動與智慧感知場景,內部整合多種感測與通訊模組,連接系統需在有限空間內兼顧穩定性與使用安全性;
· 協作機器人
強調靈活部署與人機協同,連接器需支援快速裝配與維護,並在頻繁運動條件下保持長期穩定;
· 自主移動機器人(AMR / AGV)
在持續運動與振動環境中運行,對電源與控制信號傳輸的連續性與可靠性提出更高要求。
二、機器人關鍵結構中的連接需求
從系統結構來看,機器人內部的連接需求主要集中在關節模組、控制系統以及移動執行單元等關鍵區域。其他如感測單元、末端執行器及內部佈線系統,通常作為上述結構的組成部分或擴展模組進行整合。
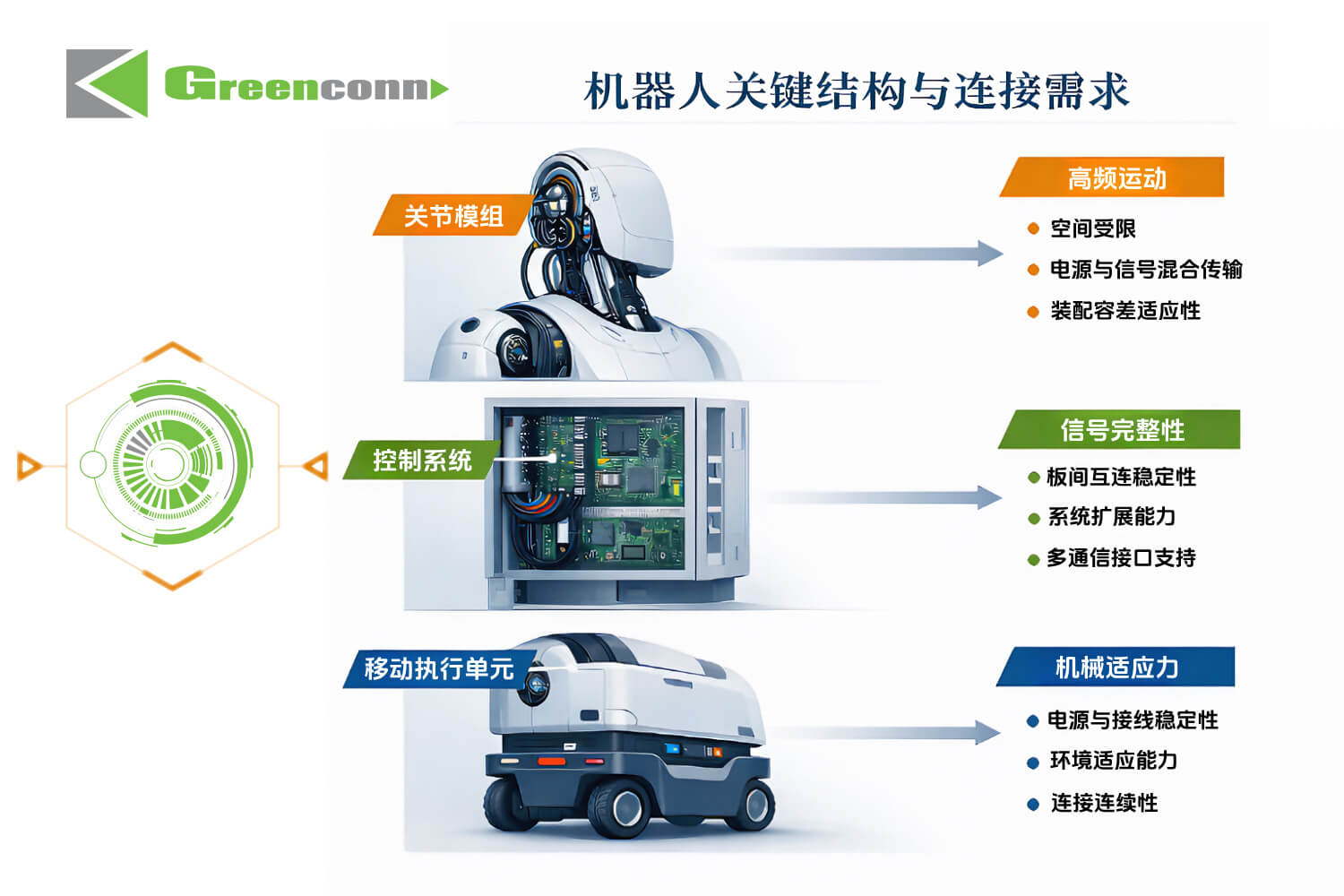
(機器人關鍵結構與連接需求)
不同結構在空間約束、運動形式、信號類型及環境條件方面存在明顯差異,其對連接系統的核心要求並不在於具體連接器“品類”,而在於連接能力是否能夠匹配實際工程工況。
1. 關節模組:高頻運動下的穩定連接
關節模組是機器人中運動最頻繁、結構最緊湊的區域,連接系統需具備一定裝配容差能力,在有限空間內實現電源與信號的可靠傳輸,並在持續運動條件下保持穩定接觸。
2. 控制系統:信號完整性與系統擴展
控制櫃與控制板系統承擔著信號處理與邏輯控制功能,連接系統需保障板級互連的穩定性、敏感信號的完整性,以及對工業通訊介面與系統擴展的支援能力。
3. 移動執行單元:複雜工況下的可靠連接
在移動底盤及驅動單元中,連接系統需長期應對振動與移動工況,重點關注電源與控制線路的穩固接入、連接連續性及必要的環境適應能力。
三、Greenconn 在機器人連接方案中的工程支援能力
圍繞機器人系統在關節運動、控制處理與移動執行等關鍵結構中的連接需求,Greenconn 可提供多種成熟的連接解決方案,用於支援不同系統架構下的工程設計。
其連接方案可應用於板間互連、電源與信號混合傳輸、高密度空間佈局以及具備一定環境適應要求的應用場景,幫助機器人系統在裝配一致性、長期運行穩定性及系統整合方面實現可靠連接。
實際連接方案仍需結合機器人類型、運行工況及系統架構進行綜合評估,相關連接形式與技術路徑亦可根據具體應用需求進行靈活調整。
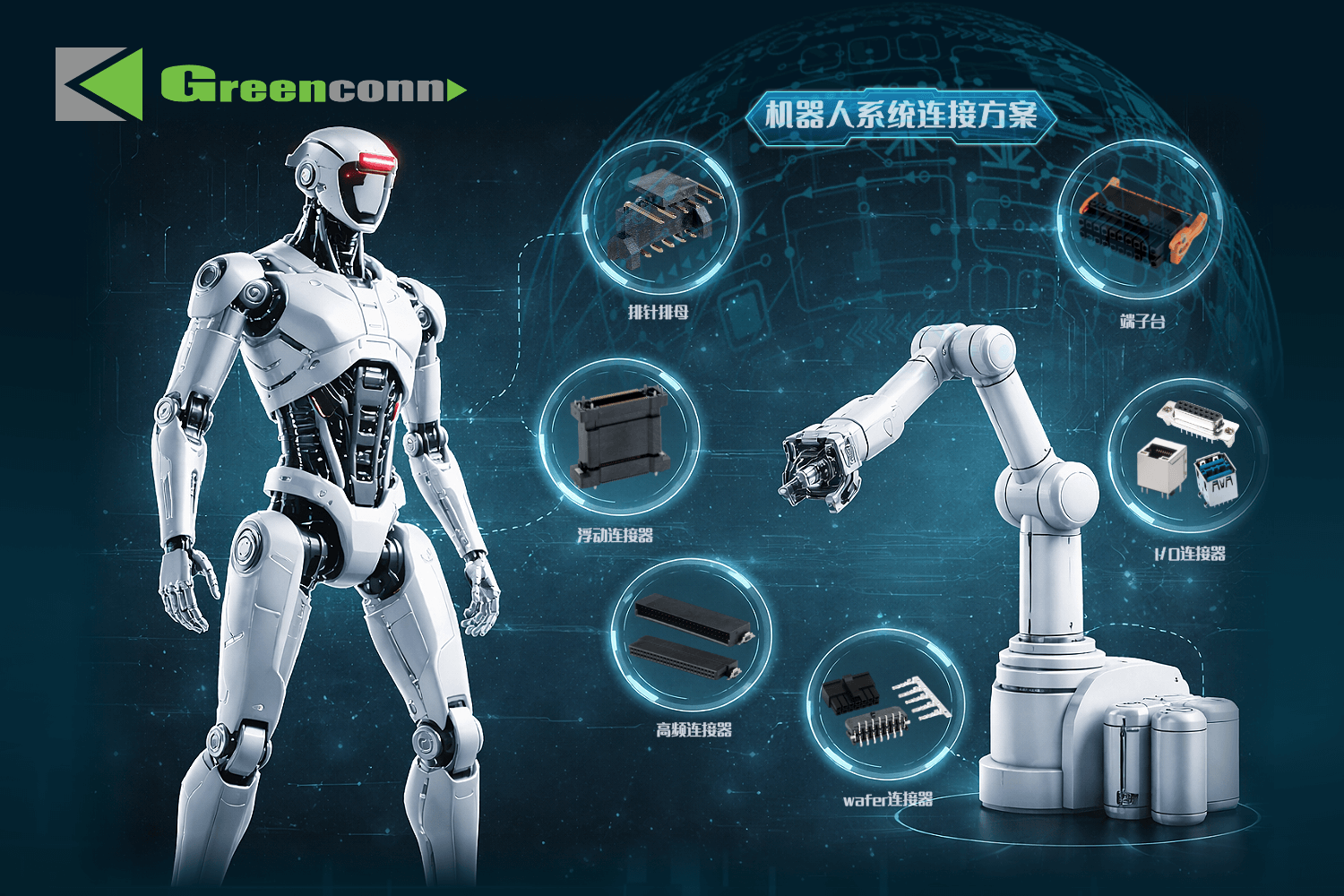
(Greenconn 機器人系統連接方案)
四、機器人連接器需求發展趨勢
伴隨機器人系統向更高性能、更高整合度發展,連接器的工程需求也在持續演進:
· 穩定性與低延遲並重
滿足即時控制場景下的可靠信號傳輸需求;
· 高速數據與大電流並行
支援動力與信號的一體化連接;
· 高密度與小型化設計
適應關節及內部空間受限的結構佈局;
· 系統級可靠性提升
在提升系統協同效率的同時,降低裝配與運維複雜度。
面向機器人產業持續升級的趨勢,Greenconn 將持續圍繞工程可靠性,優化高速、高電流及高密度連接解決方案,為機器人系統提供穩定、高效的連接基礎。

