GB01系列線對板連接器:在機器人關節模組中的應用與設計考量
在人形機器人向高自由度與高動態響應發展的過程中,關節模組通常需要在有限空間內整合驅動單元、減速機構、編碼器以及控制電路等多個功能模組。電氣連接不僅承擔電源與訊號傳輸,還會對系統的穩定性與控制精度產生間接影響。
(GB01系列線對板連接器在關節模組中的應用示意)
在此類高整合度結構中,連接器需在空間約束、動態運動以及多訊號並行傳輸的條件下,實現穩定的電氣連接與可靠的機械保持。
典型關節模組由電機、減速機構、編碼器及驅動控制單元構成,屬於機電高度耦合系統。內部連接點的接觸狀態、阻抗特性及抗振性能,會影響訊號完整性,並進一步作用於系統閉環控制表現。
關節模組中的連接器設計要求
在人形機器人關節應用中,連接器通常需要在以下工程約束下實現可靠運行:
1. 多通道佈線與電氣隔離
關節內部同時承載電源、控制訊號及編碼器訊號。多通道並行佈線可能引入串擾或耦合問題,需要透過端子佈局與結構設計進行控制;
2. 持續振動環境下的接觸穩定性
關節在運行過程中存在週期性微振動,對接觸介面的穩定性提出要求,以降低瞬態接觸不良對訊號連續性的影響;
3. 運動過程中的線束應力管理
關節運動會導致線束反覆彎折,連接器端接區域需要具備一定的應力緩衝能力,以降低長期機械疲勞帶來的可靠性風險;
4. 模組化裝配與維護需求
在緊湊結構中,連接器需兼顧裝配空間、鎖止可靠性以及後期維護的可操作性。
GB01系列線對板連接器的結構特性
針對關節模組的應用特點,Greenconn GB01系列線對板連接器在結構設計與接觸方案上進行了優化,以適配多通道、小空間及動態工況下的連接需求。
l 多點接觸結構
透過多接觸點設計,提高接觸冗餘度與穩定性,降低振動環境下的接觸波動風險;
l 低接觸阻抗(≤30 mΩ)
透過接觸結構與材料匹配控制接觸電阻,降低電源路徑壓降,同時提升訊號傳輸穩定性;
l 緊湊型佈局(1.25 mm間距)
在有限空間內實現多通道整合,支援關節模組內部電源與訊號的混合佈線需求;
l 抗振結構與鎖止設計
透過結構設計增強連接保持力,降低振動或衝擊條件下的意外鬆脫風險;
l 客製化支援能力
支援PIN定義、線束配置及結構適配等客製化開發,以匹配不同關節結構的整合需求。
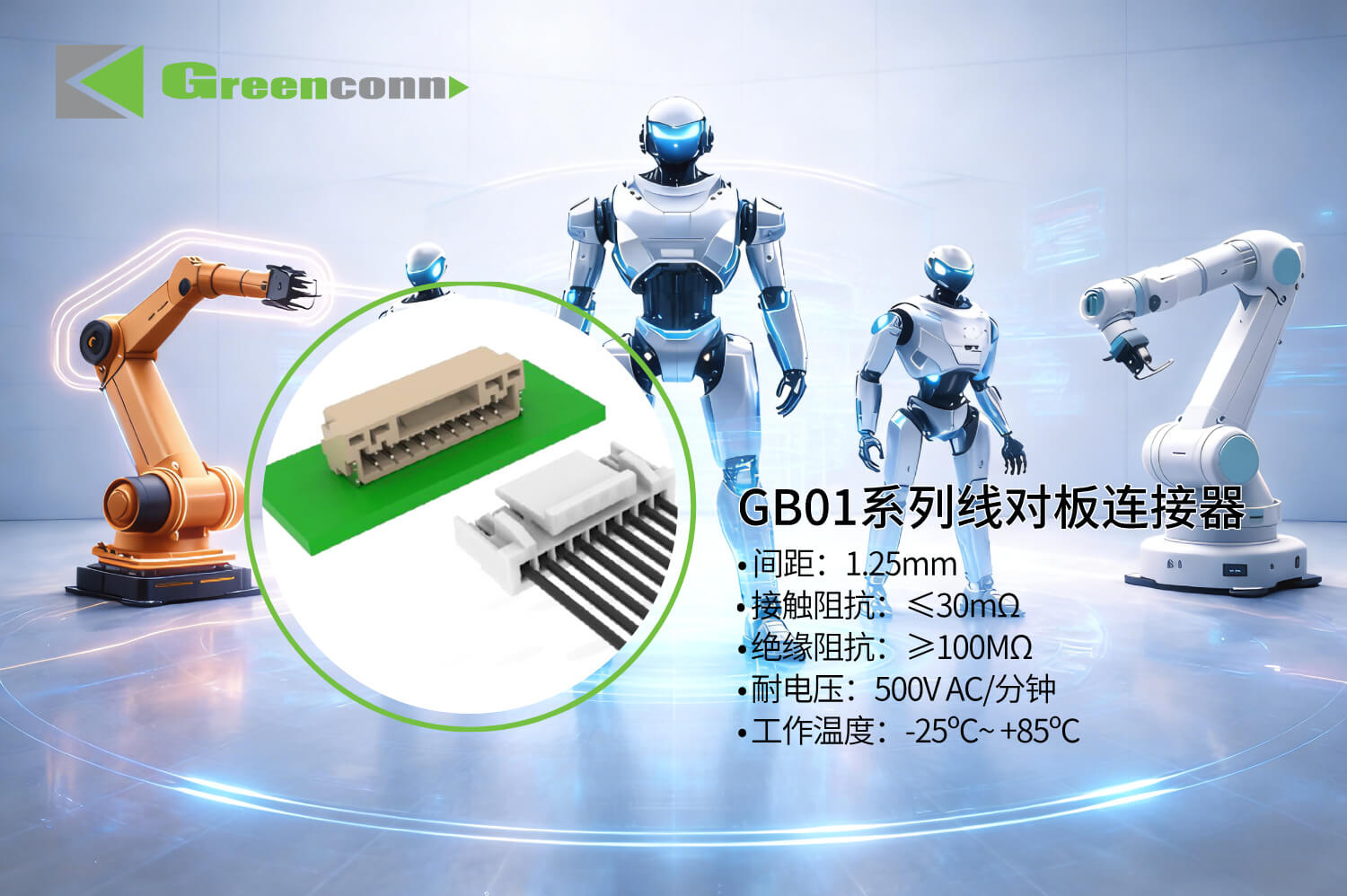
(GB01系列線對板連接器結構與對接示意)
隨著人形機器人向高動態與長週期運行方向發展,關節模組對連接器在空間利用、接觸穩定性及訊號完整性方面提出更高要求。連接設計也將持續向緊湊化、多通道整合及面向動態工況的可靠性方向演進,以適配更複雜的系統整合需求。

